
欢迎大家来到安川机器人基础操作培训线上课堂第三期!
在正式对工业机器人进行示教编程之前,我们要充分了解该厂家的动作坐标系,了解不同坐标系下机器人各轴的运动方式和呈现的轨迹状态。此外,在实际示教编程过程中,不同的安全模式,也会影响相应功能的设定和使用。
本次课程,我们一起来学习安川工业机器人的动作坐标系和安全模式变更操作。
※ 1-1 安川工业机器人的动作坐标系介绍
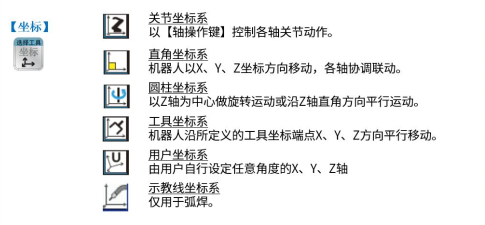
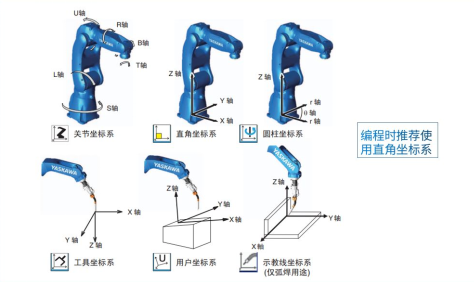
安川工业机器人的动作坐标系有关节坐标系、直角坐标系、圆柱坐标系、工具坐标系、用户坐标系和示教线坐标系,其中示教线坐标系仅用于弧焊。详见下图。
※ 1-2 动作坐标系的切换操作
示教器上方状态栏处有若干个图标,从左开始数第二个图标显示的是当前动作坐标系,按下【坐标】键,可以更改当前动作坐标系。以通用用途机器人为例,按下【坐标】键,对应的图标会按照【关节—直角/圆柱—工具—用户】坐标的顺序依次进行切换。要注意的是,直角和圆柱坐标系的切换,不能通过按【坐标】键来直接切换,详见下方的操作视频。
▲ 直角、圆柱坐标系的切换操作
※ 2-1 安川工业机器人的安全模式类型介绍
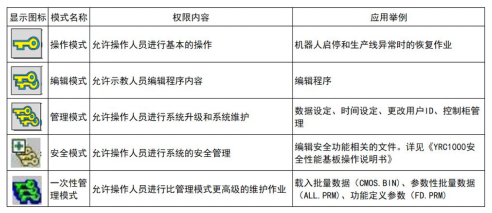
安川工业机器人一共有5种安全模式。分别为操作模式、编辑模式、管理模式、安全模式和一次性管理模式。示教器上方状态栏处有若干个图标,从左开始数第四个图标显示的是当前安全模式,其中一把钥匙对应操作模式、两把钥匙对应编辑模式、三把钥匙对应管理模式、有1个加号和3把钥匙对应安全模式、如果是绿色的三把钥匙则对应一次性管理模式。在不同的安全模式下,对机器人的操作权限也是不一样的。详见下图。
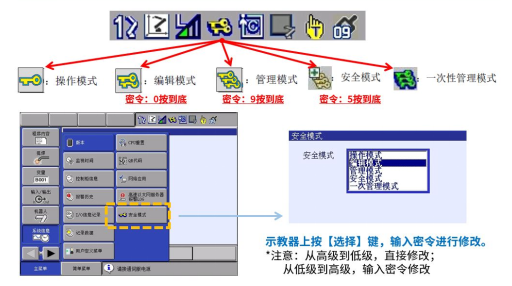
YRC1000控制柜中,有五种安全模式
※ 2-2 安川工业机器人的安全模式变更操作
▲ 安全模式变更操作



服务热线



